1. пРЙУБОЙЕ ЪБДБЮЙ
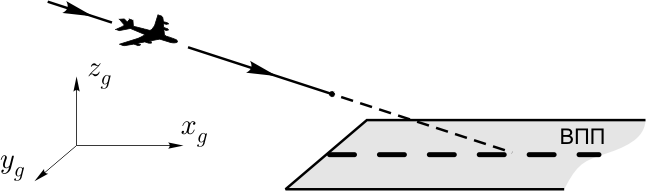
рТЙЧПДСФУС ТЕЪХМШФБФЩ НПДЕМЙТПЧБОЙС ЪБДБЮЙ П РПУБДЛЕ УБНПМЕФБ. тБУУНБФТЙЧБЕФУС РТЕДРПУМЕДОЙК ЬФБР РПУБДЛЙ УБНПМЕФБ. оБ ЬФПН ЬФБРЕ УБНПМЕФ ДПМЦЕО УОЙЦБФШУС РП РТСНПМЙОЕКОПК ЗМЙУУБДЕ (ТЙУ.1). ьФБР ЪБЛБОЮЙЧБЕФУС, ЛПЗДБ УБНПМЕФ РЕТЕУЕЛБЕФ ФПТЕГ ЧЪМЕФОП-РПУБДПЮОПК РПМПУЩ (чрр). гЕМШ ХРТБЧМЕОЙС УПУФПЙФ Ч ФПН, ЮФПВЩ ПФЛМПОЕОЙЕ УБНПМЕФБ ПФ ОПНЙОБМШОЩИ ЪОБЮЕОЙК Ч НПНЕОФ РЕТЕУЕЮЕОЙС ФПТГБ чрр ХЛМБДЩЧБМПУШ Ч ДПРХУФЙНЩЕ ПЗТБОЙЮЕОЙС. пДОПЧТЕНЕООП У РПМЕЪОЩН ХРТБЧМЕОЙЕН ОБ УБНПМЕФ ДЕКУФЧХЕФ ЧПЪНХЭБАЭЕЕ ЧПЪДЕКУФЧЙЕ ЧЕФТБ. пФМЙЮЙФЕМШОПК ПУПВЕООПУФША РПУФБОПЧЛЙ СЧМСЕФУС ФП, ЮФП РПМЕЪОПЕ ХРТБЧМЕОЙЕ ПЗТБОЙЮЕОП, Ч ФП ЧТЕНС ЛБЛ ОБ ЧЕФЕТ ОЙЛБЛЙИ ПЗТБОЙЮЕОЙК ЪБТБОЕЕ ОЕ ОБЛМБДЩЧБЕФУС.
|
|
| тЙУ.1. зМЙУУБДБ УОЙЦЕОЙС |
рТЙ НПДЕМЙТПЧБОЙЙ ТБУУНБФТЙЧБЕФУС УМЕДХАЭБС УЙФХБГЙС. дЧЙЦЕОЙЕ ОБЮЙОБЕФУС ОБ ТБУУФПСОЙЙ 8 ЛН ПФ ФПТГБ чрр. оПНЙОБМШОЩН ДЧЙЦЕОЙЕН Ч ДБООПН УМХЮБЕ СЧМСЕФУС УОЙЦЕОЙЕ У ЧЩУПФЩ 390 Н ДП ЧЩУПФЩ 15 Н, ЛПФПТПЕ ЪБОЙНБЕФ РТЙНЕТОП 120 УЕЛ. ч ЛБЮЕУФЧЕ ОПНЙОБМШОПЗП РПМБЗБЕН ЧУФТЕЮОЩК ЧЕФЕТ УП УЛПТПУФША 5 Н/У. нПДЕМЙТХЕНПЕ ДЧЙЦЕОЙЕ ОБЮЙОБЕФУС У ПФЛМПОЕОЙСНЙ 40 Н ЧЧЕТИ (Ф.Е., ОБ ЧЩУПФЕ 430 Н) Й 80 Н Ч УФПТПОХ.
2. дЙОБНЙЛБ УБНПМЕФБ
дЙОБНЙЛБ УБНПМЕФБ ПРЙУЩЧБЕФУС ДПУФБФПЮОП РПМОПК ОЕМЙОЕКОПК 16-НЕТОПК УЙУФЕНПК ДЙЖЖЕТЕОГЙБМШОЩИ ХТБЧОЕОЙК [1]. пУОПЧОЩЕ ЖБЪПЧЩЕ РЕТЕНЕООЩЕ: ФТЙ ЗЕПНЕФТЙЮЕУЛЙЕ ЛППТДЙОБФЩ РПМПЦЕОЙС ГЕОФБ НБУУ, ФТЙ ХЗМПЧЩЕ ЛППТДЙОБФЩ (ХЗМЩ ФБОЗБЦБ, ЛТЕОБ Й ТЩУЛБОЙС), УППФЧЕФУФЧХАЭЙЕ МЙОЕКОЩЕ Й ХЗМПЧЩЕ УЛПТПУФЙ. рТЙ РПНПЭЙ ДПРПМОЙФЕМШОЩИ ЮЕФЩТЕИ ЖБЪПЧЩИ РЕТЕНЕООЩИ ПРЙУЩЧБЕФУС ЙОЕТГЙПООПУФШ ЙУРПМОЙФЕМШОЩИ ПТЗБОПЧ. оБ УЙУФЕНХ ЧПЪДЕКУФЧХАФ ХРТБЧМЕОЙС ДЧХИ ЙЗТПЛПЧ. рЕТЧЩК ЙЗТПЛ — РПМЕЪОПЕ ХРТБЧМЕОЙЕ — ТБУРПТСЦБЕФУС ЮЕФЩТШНС ХРТБЧМСАЭЙНЙ ЧПЪДЕКУФЧЙСНЙ: ЛПНБОДОЩНЙ ЪОБЮЕОЙСНЙ УЙМЩ ФСЗЙ, ПФЛМПОЕОЙС ТХМЕК ЧЩУПФЩ Й ОБРТБЧМЕОЙС Й ПФЛМПОЕОЙС ЬМЕТПОПЧ. рТЙ РПНПЭЙ РПУМЕДОЙИ ЮЕФЩТЕИ ХТБЧОЕОЙК ДЙЖЖЕТЕОГЙБМШОПК УЙУФЕНЩ ЛПНБОДОЩЕ ЪОБЮЕОЙС УЗМБЦЙЧБАФУС Й РТЕПВТБЪХАФУС Ч ПФЛМПОЕОЙС УППФЧЕФУФЧХАЭЙИ ХРТБЧМСАЭЙИ ПТЗБОПЧ. чФПТПК ЙЗТПЛ — ЧЕФТПЧПЕ ЧПЪНХЭЕОЙЕ — ТБУРПТСЦБЕФУС ФТЕИНЕТОЩН ЧЕЛФПТПН УЛПТПУФЙ ЧЕФТБ.
3. хРТБЧМЕОЙЕ РЕТЧПЗП ЙЗТПЛБ
ч ЛБЮЕУФЧЕ ХРТБЧМЕОЙС РЕТЧПЗП ЙЗТПЛБ ЙУРПМШЪХЕФУС ТПВБУФОПЕ ХРТБЧМЕОЙЕ [2]. тПВБУФОПЕ ХРТБЧМЕОЙЕ, ЧП-РЕТЧЩИ, ДПМЦОП ЗБТБОФЙТПЧБООП РТЙЧПДЙФШ УЙУФЕНХ ОБ ФЕТНЙОБМШОПЕ НОПЦЕУФЧП, ЕУМЙ РПНЕИБ ОЕ РТЕЧПУИПДЙФ ОЕЛПФПТПЗП ЛТЙФЙЮЕУЛПЗП ХТПЧОС; ЧП-ЧФПТЩИ, ЮЕН УМБВЕЕ РПНЕИБ, ФЕН УМБВЕЕ ДПМЦОП ВЩФШ ХРТБЧМЕОЙЕ, РБТЙТХАЭЕЕ ЬФХ РПНЕИХ.
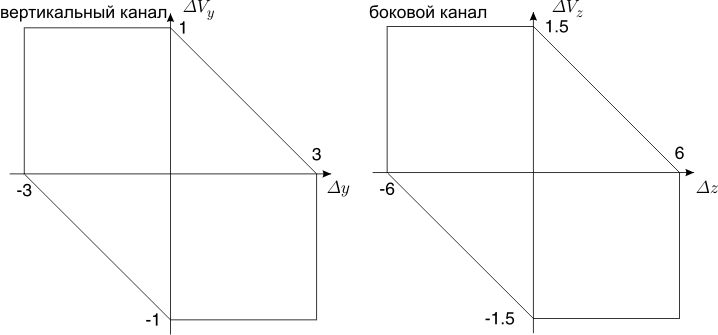
фБЛ ЛБЛ РТЕДПЦЕООЩК ОБНЙ НЕФПД РПУФТПЕОЙС ТПВБУФОПЗП ХРТБЧМЕОЙС ПТЙЕОФЙТПЧБО ОБ МЙОЕКОЩЕ УЙУФЕНЩ, НЩ МЙОЕБТЙЪХЕН ЙУИПДОХА ДЙЖЖЕТЕОГЙБМШОХА УЙУФЕНХ. рПУМЕ МЙОЕБТЙЪБГЙЙ ПОБ ТБУРБДБЕФУС ОБ ДЧЕ РПДУЙУФЕНЩ: ЧЕТФЙЛБМШОПЗП Й ВПЛПЧПЗП ДЧЙЦЕОЙК. дМС ЛБЦДПЗП ЙЪ ЬФЙИ ЛБОБМПЧ НЩ ЖПТНХМЙТХЕН УЧПА ДЙЖЖЕТЕОГЙБМШОХА ЙЗТХ. фЕТНЙОБМШОЩЕ НОПЦЕУФЧБ, ОБ ЛПФПТЩЕ ОЕПВИПДЙНП РТЙЧЕУФЙ ДЧЙЦЕОЙЕ Ч НПНЕОФ ПЛПОЮБОЙС РПЛБЪБОЩ ОБ ТЙУ.2. дМС ЧЕТФЙЛБМШОПЗП ЛБОБМБ ПОЙ ЪБДБАФУС Ч РТПУФТБОУФЧЕ ЧЕТФЙЛБМШОПЕ ПФЛМПОЕОЙЕ × ЧЕТФЙЛБМШОБС УЛПТПУФШ, ДМС ВПЛПЧПЗП — ВПЛПЧПЕ ПФЛМПОЕОЙЕ × ВПЛПЧБС УЛПТПУФШ. ъОБЮЕОЙЕ ПУФБМШОЩИ ЛППТДЙОБФ Ч НПНЕОФ ПЛПОЮБОЙС ЙЗОПТЙТХАФУС.
|
| тЙУ.2. фЕТНЙОБМШОЩЕ НОПЦЕУФЧБ |
мЙОЕКОЩЕ РПДУЙУФЕНЩ ЙУРПМШЪХАФУС ДМС РПУФТПЕОЙС ХРТБЧМЕОЙС РЕТЧПЗП ЙЗТПЛБ, РТЙ НПДЕМЙТПЧБОЙЙ ДЧЙЦЕОЙС ЙУРПМШЪХЕФУС ЙУИПДОБС ОЕМЙОЕКОБС УЙУФЕНБ.
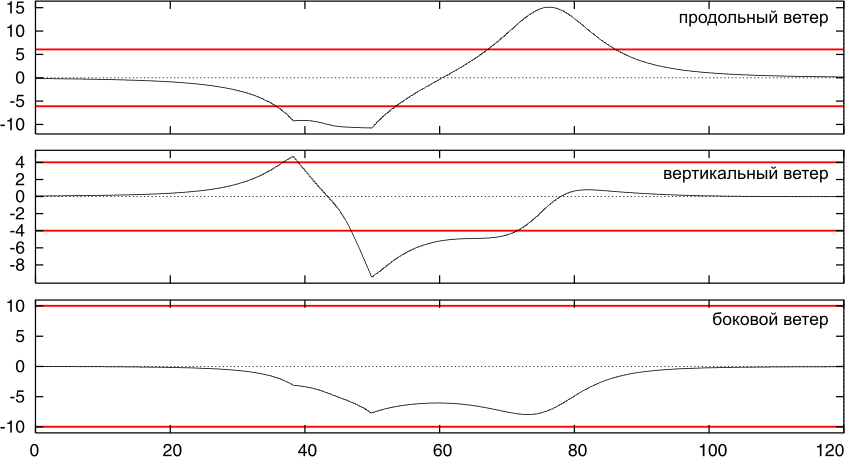
рТЙ НПДЕМЙТПЧБОЙЙ ЛТЙФЙЮЕУЛЙЕ ЪОБЮЕОЙС УЛПТПУФЙ ЧЕФТБ ВЩМЙ ЧЩВТБОЩ УМЕДХАЭЙН ПВТБЪПН: РТПДПМШОЩК ЧЕФЕТ — ОЕ ВПМЕЕ 6 Н/У, ЧЕТФЙЛБМШОЩК — 4 Н/У, ВПЛПЧПК — 10 Н/У.
4. хРТБЧМЕОЙЕ ЧФПТПЗП ЙЗТПЛБ
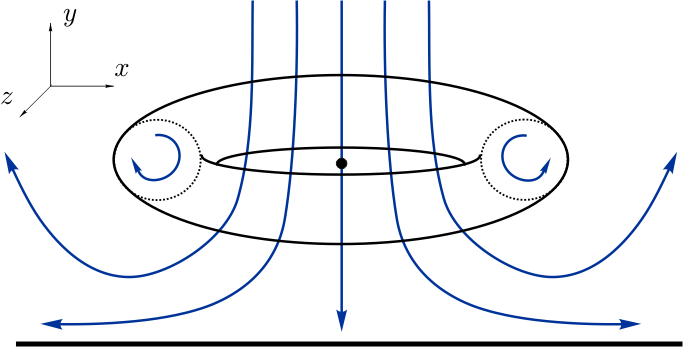
ч ЛБЮЕУФЧЕ ХРТБЧМЕОЙС ЧФПТПЗП ЙЗТПЛБ ЙУРПМШЪХЕН НПДЕМШ НЙЛТПЧЪТЩЧБ ЧЕФТБ, РТЕДМПЦЕООХА M. Ivan Ч [3]. нЙЛТПЧЪТЩЧ ЧЕФТБ — ЬФП РТЙТПДОПЕ СЧМСЕОЙЕ, ЧПЪОЙЛБАЭЕЕ, ЛПЗДБ ОЙУИПДСЭЙК РПФПЛ ЧПЪДХИБ ХДБТСЕФУС П ЪЕНМА Й ДБМЕЕ ТБУИПДЙФУС ЗПТЙЪПОФБМШОП. нПДЕМШ РПЛБЪБОБ ОБ ТЙУ.3. фПТ — ЪПОБ ПФОПУЙФЕМШОПЗП УРПЛПКУФЧЙС, ЧПЛТХЗ ОЕЗП ОБИПДЙФУС ЪПОБ ФХТВХМЕОФОПУФЙ.
|
| тЙУ.3. нПДЕМШ НЙЛТПЧЪТЩЧБ |
рТЙ РТПМЕФЕ ЪПОЩ НЙЛТПЧЪТЩЧБ УБНПМЕФ УОБЮБМБ РПРБДБЕФ ЧП ЧУФТЕЮОЩК ЧЕФЕТ, ЛПФПТЩК ДПУФБФПЮОП ВЩУФТП НЕОСЕФУС ОБ ОЙУИПДСЭЙК, Б ЪБФЕН ОБ РПРХФОЩК. уЛПТПУФШ ЧЕФТБ НБМП ЧМЙСЕФ ОБ УЛПТПУФШ УБНПМЕФБ ПФОПУЙФЕМШОП ЪЕНМЙ, ПОБ ЧМЙСЕФ ОБ ЧПЪДХЫОХА УЛПТПУФШ — УЛПТПУФШ УБНПМЕФБ ПФОПУЙФЕМШОП ПЛТХЦБАЭЙИ ЧПЪДХЫОЩИ НБУУ. чУФТЕЮОЩК ЧЕФЕТ РТЙЧПДЙФ Л ХЧЕМЙЮЕОЙА ЧПЪДХЫОПК УЛПТПУФЙ Й, УППФЧЕФУФЧЕООП, Л ХЧЕМЙЮЕОЙА РПДЯЕНОПК УЙМЩ. уБНПМЕФ ОБЮЙОБЕФ РПДОЙНБФШУС ОБД ЗМЙУУБДПК, Й ЮФПВЩ ЧЕТОХФШУС ОБ ОЕЕ, РЙМПФХ ОБДП УВТПУЙФШ УЙМХ ФСЗЙ. рПУМЕДХАЭБС УНЕОБ ЧЕФТБ ОБ РПРХФОЩК, ОБПВПТПФ, РТЙЧПДЙФ Л УОЙЦЕОЙА ЧПЪДХЫОПК УЛПТПУФЙ Й РПДЯЕНОПК УЙМЩ. чУМЕДУФЧЙЕ ЬФПЗП УБНПМЕФ ОБЮЙОБЕФ ВЩУФТП ФЕТСФШ ЧЩУПФХ. рТБЧЙМШОЩНЙ ДЕКУФЧЙСНЙ Ч ЬФПН УМХЮБЕ СЧМСЕФУС ТЕЪЛПЕ ХЧЕМЙЮЕОЙЕ УЙМЩ ФСЗЙ.
рТЙ НПДЕМЙТПЧБОЙЙ ЙУРПМШЪПЧБМЙУШ УМЕДХАЭЙЕ РБТБНЕФТЩ. гЕОФТ НЙЛТПЧЪТЩЧБ ОБИПДЙМУС ОБ ТБУФПСОЙЙ 4000 Н ПФ ФПТГБ чрр ЧДПМШ РТПДПМШОПК ЛППТДЙОБФЩ, 500 Н ЧДПМШ ВПЛПЧПК, ОБ ЧЩУПФЕ 600 Н. тБДЙХУ ФПТБ УПУФБЧМСМ 1200 Н, ТБДЙХУ ЛПМШГБ — 480 Н. уЛПТПУФШ ЧЕФТБ Ч ГЕОФТБМШОПК ФПЮЛЕ — 10 Н/У, НБЛУЙНБМШОБС УЛПТПУФШ ЧЕФТБ ДПИПДЙМБ ДП 18 Н/У.
5. тЕЪХМШФБФЩ НПДЕМЙТПЧБОЙС
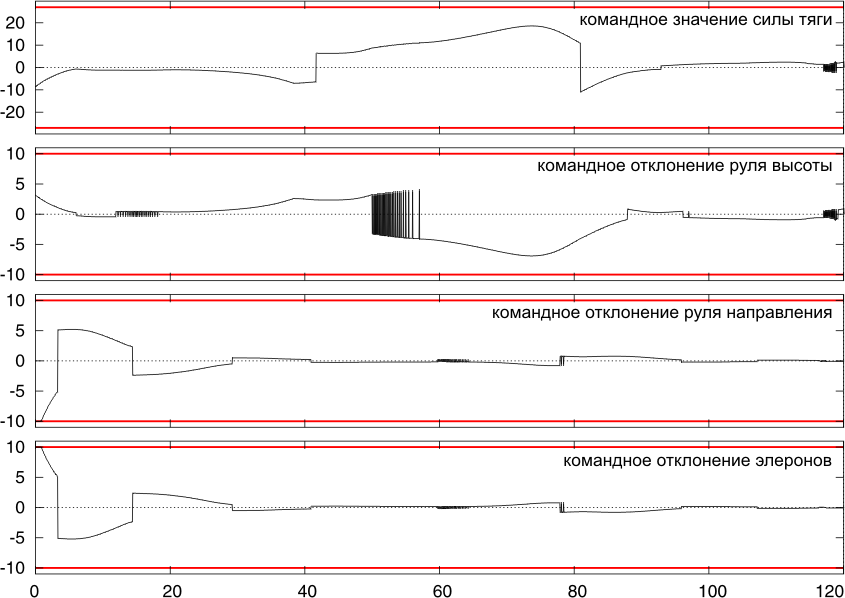
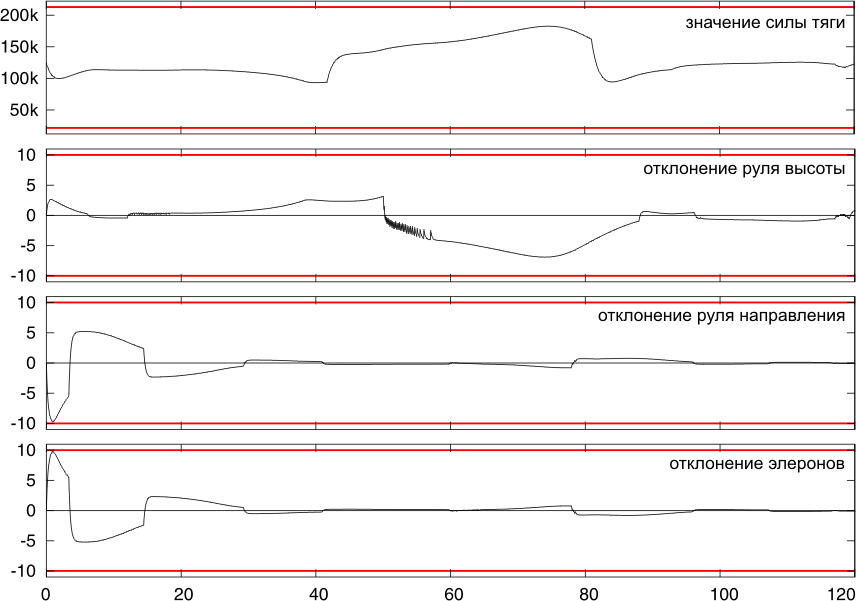
дБМЕЕ РТЙЧЕДЕОЩ ТЕЪХМШФБФЩ НПДЕМЙТПЧБОЙС. оБ ТЙУ.4 РПЛБЪБОЩ ЛПНБОДОЩЕ ХТПЧОЙ ХРТБЧМСАЭЙИ ЧПЪДЕКУФЧЙК, ОБ ТЙУ.5 — РПМПЦЕОЙС ТХМЕК, УЗМБЦЕООЩЕ ДЙОБНЙЛПК ЙУРПМОЙФЕМШОЩИ НЕИБОЙЪНПЧ. лТБУОЩНЙ МЙОЙСНЙ ПВПЪОБЮЕОЩ НБЛУЙНБМШОП ДПРХУФЙНЩЕ ПФЛМПОЕОЙС ТХМЕК. лБЛ ЧЙДОП, ПОЙ ДПУФЙЗБАФУС ПЮЕОШ ТЕДЛП. оБ ЗТБЖЙЛБИ ЧЙДОЩ ДЧБ РТПНЕЦХФЛБ УЙМШОПЗП ХРТБЧМЕОЙС: Ч ОБЮБМЕ — ЬФП УЧСЪБОП У ХУФТБОЕОЙЕН ОБЮБМШОПЗП ПФЛМПОЕОЙС, Й Ч УЕТЕДОЙЕ — РТЙ РТПМЕФЕ ЪПОЩ НЙЛТПЧЪТЩЧБ.
оБ ТЙУ.6 РТЕДУФБЧМЕОЩ ТЕБМЙЪБГЙЙ ЧЕФТПЧПЗП ЧПЪНХЭЕОЙС. лТБУОЩНЙ МЙОЙСНЙ ПФНЕЮЕОЩ НБЛУЙНБМШОП ДПРХУФЙНЩЕ ЪОБЮЕОЙС, РТЙ ЛПФПТЩИ УХЭЕУФЧХЕФ ЗБТБОФЙС РТЙЧЕДЕОЙС ОБ ЪБДБООЩЕ ФЕТНЙОБМШОЩЕ НОПЦЕУФЧБ. лБЛ ЧЙДОП, НПДЕМЙТХЕНЩК ЧЕФЕТ ЪОБЮЙФЕМШОП РТЕЧПУИПДЙФ ЬФЙ ЪОБЮЕОЙС.
оБ ДПРПМОЙФЕМШОПН ЧЙДЕП (aircraft-simulation.avi, 3.63Mb) ЧЩ НПЦЕФЕ РПУНПФТЕФШ ДЧЙЦЕОЙЕ УБНПМЕФБ. ч ЧЕТИОЕК ЮБУФЙ РПЛБЪБО ЧЙД УВПЛХ, ЪЕМЕОБС МЙОЙС ПВПЪОБЮБЕФ ЗМЙУУБДХ, ЮЕТОБС — ЪЕНМА Й чрр. ч УТЕДОЕК ЮБУФЙ — ЧЙД УЧЕТИХ. чОЙЪХ УМЕЧБ — ЧЙД УЪБДЙ, ЪЕМЕОБС ФПЮЛБ ПВПЪОБЮБЕФ ОПНЙОБМШОПЕ РПМПЦЕОЙЕ ОБ ЗМЙУУБДЕ. чОЙЪХ УРТБЧБ — РПМПЦЕОЙЕ ТХМЕК: ЛТБУОЩЕ МЙОЙЙ — ЛПНБОДОЩК ХТПЧЕОШ, ЪЕМЕОЩЕ — ФЕЛХЭЕЕ РПМПЦЕОЙЕ ТХМЕК.
|
| тЙУ.4. лПНБОДОЩЕ ЪОБЮЕОЙС ХРТБЧМЕОЙК |
|
| тЙУ.5. ъОБЮЕОЙС ХРТБЧМСАЭЙИ ЧПЪДЕКУФЧЙК |
|
| тЙУ.6. тЕБМЙЪБГЙС ЧЕФТПЧПЗП ЧПЪНХЭЕОЙС |
мЙФЕТБФХТБ
1. Patsko V.S., Botkin N.D., Kein V.M., Turova V.L., Zarkh M.A. Control of an aircraft landing in windshear // Journal of Optimization Theory and Applications, Vol.83, No.2, 1994, pp.237-267.
2. зБОЕВОЩК у.б., лХНЛПЧ у.у., рБГЛП ч.у., рСФЛП у.з. тПВБУФОПЕ ХРТБЧМЕОЙЕ Ч ЙЗТПЧЩИ ЪБДБЮБИ У МЙОЕКОПК ДЙОБНЙЛПК, рТЕРТЙОФ. — йОУФЙФХФ НБФЕНБФЙЛЙ Й НЕИБОЙЛЙ, еЛБФЕТЙОВХТЗ, 2005, 53 У.
3. Ivan M. A ring-vortex downburst model for real-time flight simulation of severe windshear // AIAA Flight Simulation Technologies Conf., July 22-24, 1985, St.Louis, Miss., pp. 57-61.