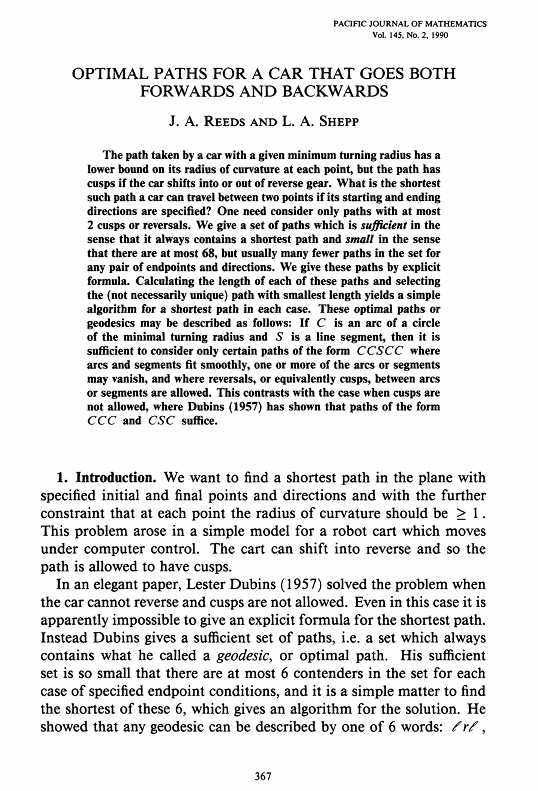
In 1990, Pacific Journal of Mathematics published (vol. 2, no. 2) a paper by American mathematicians James A. Reeds and Lawrence A. Shepp on optimal control of a system where one control parameter governs the turning radius of a vehicle whereas the second control parameter is responsible for instantaneous change of the direction of motion to the opposite one. The authors realized that instantaneous change is an idealization, and for this reason wrote in section 2 that such an assumption for slow moving objects is a rational compromise to enable mathematical investigation of the problem.
The model of dynamics proposed by Reeds and Shepp became very popular in the literature on mathematical theory of control, especially among specialists on theoretical robotics. They called it the "Reeds – Shepp car."
We also used the Reeds – Shepp model in works on differential games and sent some of our papers to L. Shepp. There remain letters by L. Shepp where he asked about the state of the art of differential game theory and remembered some episodes of his stay in Moscow in 1966-67 when he had a fellowship in the scientific group headed by A.N. Kolmogorov.
Lawrence Shepp died on April 23, 2013. On January 30, 2014, the University of Pensilvania where he was working last time made a memorial celebration of his life. In the Center for Applied Probability (CAP) of Columbia University, a scientific conference in honor of L. Shepp was held on April 25, 2014. He worked at Columbia University from 1973 to 1996.
Below, the following pieces are placed: initial part of the famous paper by Reeds and Shepp; list of some publications that utilize the model of dynamics by Reeds and Shepp; scientific biography of L. Shepp prepared by the organizers of the celebration in his memory; video with two excerpts of the celebration: the speech by J. Reeds and the presentation by Edward George (the moderator of the celebration) who demonstrated our slides and commented on them; presentation of J. Reeds at the Columbia University conference in honor of L. Shepp.
V.S. Patsko, V.L. Turova
Seven pages of the Reeds' and Shepp's article
1. Sussman H., Tang W. Shortest paths for the Reeds – Shepp car: a worked out example of the use of geometric techniques in nonlinear optimal control. Tech. Rep. SYCON-91-10, Rutgers University, 1991.
2. Boissonnat J.-D., Cereso A., Leblond J. Shortest path of bounded curvature in the plane. J. Intelligent and Robotic Systems, vol. 11, 1994, pp. 5–20.
3. Soueres P., Fourquet J.-Y., Laumond J.-P. Set of reachable positions for a car. IEEE Trans. on Automatic Control, vol. 39, no. 8, 1994, pp. 1626–1630.
4. Degtyareva-Kostova E., Kostov V.P. Suboptimal paths in the problem of planar motion with a constraint on the derivative of the trajectory curvature. Automat. Remote Control, vol. 58, no. 7, part 2, 1997, pp. 1173–1187. Translation from Avtomat. i Telemekh., no. 7, 1997, 132–150 (Russian).
5. Laumond J.-P. (Ed.) Robot Motion Planning and Control, Berlin, Springer-Verlag, 1998.
6. Venditelli M., Laumond J.-P., Nissoux C. Obstacle distance for car-like robots. IEEE Trans. on Robotics and Automation, vol. 15, no. 4, 1999, pp. 678–691.
7. Fraichard T., Scheuer A. From Reeds and Shepp's to continuous-curvature paths. IEEE Trans. on Robotics and Automation, vol. 20, no. 6, 2004, pp. 1025–1035.
8. Wang H.-F., Chen Y.-Z. Time-optimal trajectories for a car-like robot. Acta Automatica Sinica, vol. 34, no. 4, 2008, pp. 445–452.
9. Patsko V.S, Turova, V.L. From Dubins' car to Reeds and Shepp's mobile robot. Computing and Visualization in Science, vol. 12, 2009, pp. 345–364.
10. Patsko V.S., Turova V.L. Numerical investigation of the value function for the homicidal chauffeur problem with a more agile pursuer. In: Advances in Dynamic Games and Their Applications (Annals of the International Society of Dynamic Games), edited by P. Bernhard, V. Gaitsgory, O. Pourtallier, Boston: Birkhauser, vol. 10, 2009, pp. 231–258.
11. Boscain U., Rossi F. Projective Reeds – Shepp car on S2 with quadratic cost. ESAIM: Control, Optimisation and Calculus of Variations, vol. 16, no. 2, 2010, pp. 275–297.
12. Dolgov D., Thrun S., Montemerlo M., Diebel J. Path planning for autonomous vehicles in unknown semi-structured environments, International Journal of Robotics Research, vol. 29, no. 5, 2010, pp. 485–501.
13. Lu W. A direct method to find optimal trajectories for mobile robots using inverse kinematics. Thesis, Dartmouth College, 2011.
14. Shevchenko I. Locally optimizing strategies for approaching the furthest evader. Contributions to Game Theory and Management, vol. 5, 2012, pp. 293–303.
15. Dmitruk A.V., Samylovskiy I.A. Optimal synthesis in the Reeds and Shepp problem with oneside variation of velocity. JOTA, vol. 158, no. 3, 2013, pp. 874–887.
If you do not play, download video by link: episod1_00.mp4.
If you do not play, download video by link: episod2_01.mp4.